04 / Autonomous Rover
Autonomous Rover
A compact autonomous rover project combining computer vision, onboard electronics, and physical packaging. This page now uses the real build photos and demo footage so the project reads like a working prototype instead of a placeholder.
Click any image to open the full gallery, or watch the rover demo clip below to see the project in motion.
Project Story
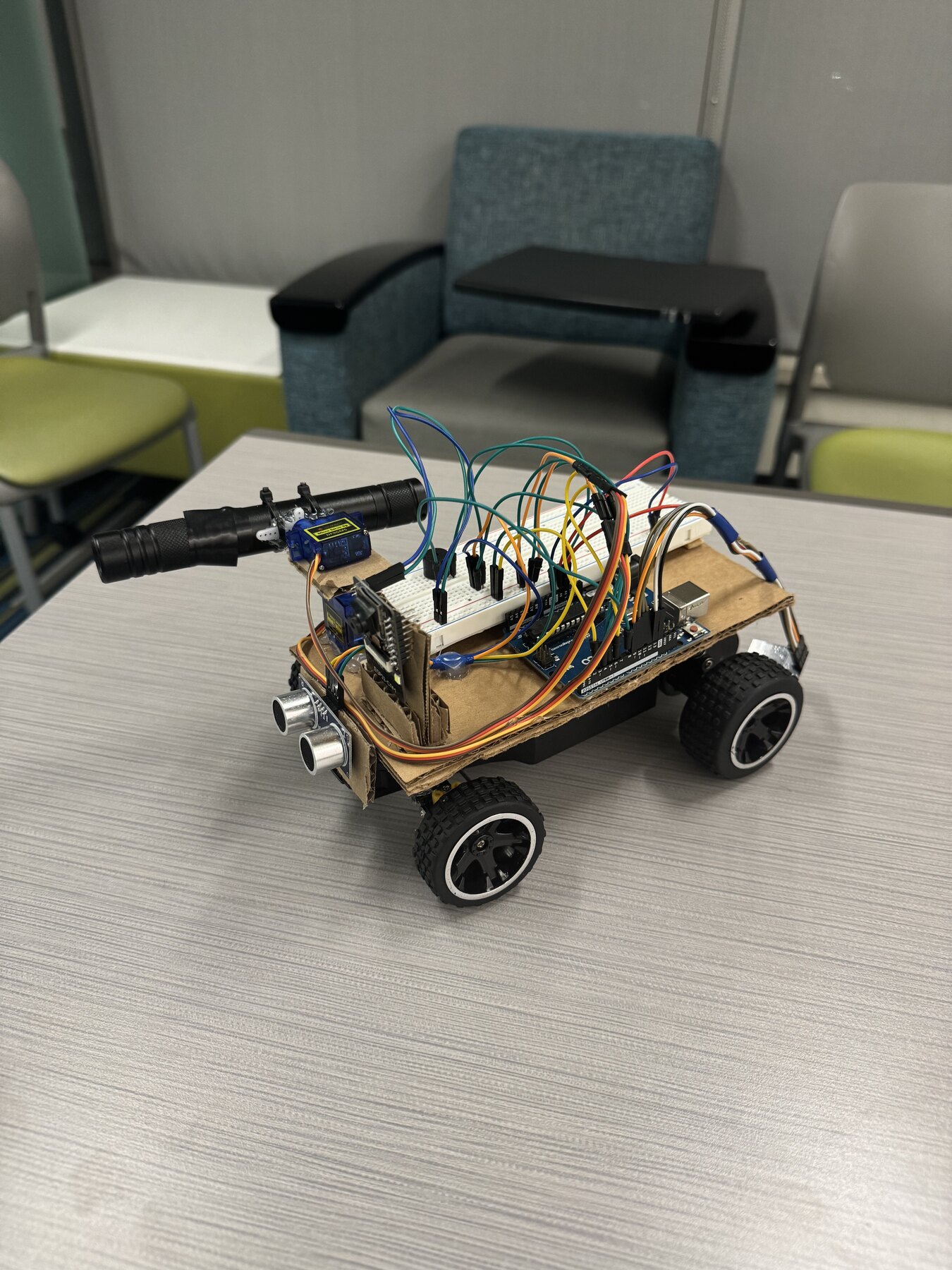
This rover project is strongest when the software and hardware are shown together. The body, sensor placement, board layout, and camera position all matter because they shape how well the system can detect, track, and react in the real world.
The photo sequence below gives the project a more complete story: early enclosed packaging, exposed electronics, multiple chassis views, and a live demo clip that makes the platform feel active rather than static.
What This Page Highlights
The layout is set up to make the project feel like a compact robotics case study.
- Chassis and packaging views from multiple angles.
- Exposed electronics and sensor layout.
- Computer-vision context through the laptop/demo media.
- A full-screen gallery for browsing the build sequence cleanly.
Demo Clip
Rover In Motion
The `.mp4` is used as the primary web video source, with the `.mov` left as a fallback source. That gives you the best browser compatibility without losing the original upload.
This section is a better place for motion content than the hero because it lets the build photos stay sharp while still giving the rover a chance to show behavior, not just appearance.
Build Gallery
Prototype Views
The image order moves from the boxed/enclosed rover into more detailed exposed-electronics views so the project feels progressively more technical as you browse.
Open the full gallery to flip through all rover images in order with keyboard arrows or the on-screen controls.